Dwa pliki mogą wyglądać na powiązane, a mimo to być złym porównaniem
Porównanie oryginalnego pliku z plikiem zmodyfikowanym brzmi prosto: otwórz oba, znajdź różnice i sprawdź zmienione mapy. Trudność zaczyna się wtedy, gdy pliki nie mają tej samej bazy oprogramowania.
Aktualizacja OEM może przesunąć dane, zastąpić sekcje kodu, zmienić struktury kalibracji lub wprowadzić nowe warianty map. Odczyt wirtualny może pochodzić z dopasowanego pliku z bazy danych, a nie z dokładnych bajtów wcześniej zapisanych w ECU. Plik dostarczony przez klienta może już zawierać nieudokumentowane zmiany.
WinOLS może pokazać różnice, połączyć projekty i wspierać przenoszenie zmian, ale oprogramowanie nie zastąpi identyfikacji pliku i oceny technicznej. Zanim cokolwiek zaimportujesz, tuner musi ustalić, czym jest każdy plik i czy porównanie ma sens.
Zdefiniuj pliki przed porównaniem
Używaj jasnych pojęć w projekcie:
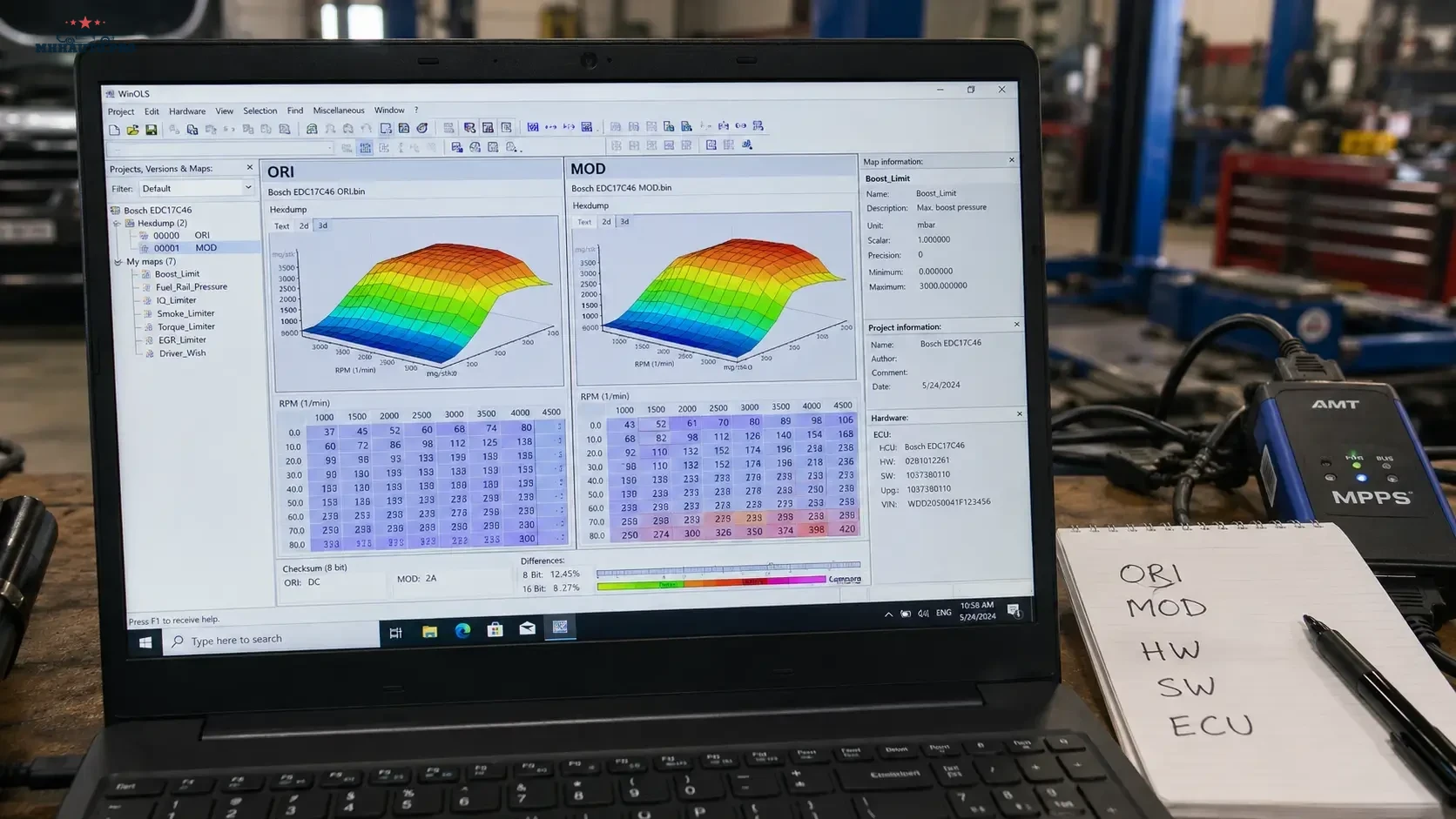
- ORI: zweryfikowany oryginał lub najlepsza dostępna baza dla dokładnego oprogramowania ECU.
- MOD: zmodyfikowana wersja wyprowadzona z udokumentowanej bazy.
- aktualizacja OEM: późniejsza lub inna wersja oprogramowania producenta.
- wirtualny oryginał: plik oryginalny dopasowany na podstawie identyfikacji ECU przez dostawcę narzędzia.
- odczyt po zapisie: dane fizycznie odczytane z jednostki sterującej po programowaniu, jeśli jest to wspierane.
- plik nieznany: każdy plik, dla którego nie ma dość dowodów, aby pewnie go sklasyfikować.
Nie oznaczaj pliku jako ORI tylko dlatego, że w nazwie widnieje „original”. Nazwa pliku to notatka, nie dowód.
Zbuduj kartę identyfikacji pliku
Przed otwarciem widoku porównania zapisz dostępną identyfikację każdego pliku.
| Pole identyfikacyjne | Plik A | Plik B |
|---|---|---|
| Rodzina ECU | Zapisz dokładny typ | Zapisz dokładny typ |
| Numer hardware | Wartość z narzędzia lub etykiety | Wartość z narzędzia lub źródła |
| Numer software | Dokładna wartość | Dokładna wartość |
| Numer kalibracji lub aktualizacji | Jeśli dostępny | Jeśli dostępny |
| Metoda odczytu | OBD, Bench, Boot lub virtual | OBD, Bench, Boot lub virtual |
| Rozmiar pliku | Zapisany w bajtach | Zapisany w bajtach |
| Źródło | Pojazd, baza narzędzia lub klient | Pojazd, baza narzędzia lub klient |
| Znana historia | Seria, tuning, aktualizacja lub nieznana | Seria, tuning, aktualizacja lub nieznana |
Zgodność rozmiaru pliku jest pomocna, ale nie dowodzi, że dwa pliki mają tę samą strukturę oprogramowania.
Trzy różne zadania porównawcze
Większość pracy porównawczej w WinOLS mieści się w jednej z trzech sytuacji. Każda wymaga innego poziomu ostrożności.
1. ORI kontra MOD z tej samej bazy
To najczystsze porównanie. MOD powstał bezpośrednio z ORI, a oba pliki mają tę samą strukturę. Różnice powinny odpowiadać udokumentowanym zmianom kalibracji oraz wszelkim oczekiwanym zmianom związanym z checksumą.
2. Jedna wersja oprogramowania OEM kontra inna
To nie jest zwykłe porównanie tuningu. Duże obszary mogą się różnić, ponieważ producent zmienił kod, diagnostykę, strukturę kalibracji lub wyrównanie danych. Różnic nie należy interpretować jako zmian tuningowych.
3. Zmodyfikowana starsza wersja kontra nowsza wersja OEM
To scenariusz transferu o najwyższym ryzyku. Stare adresy mogą już nie wskazywać na te same mapy. Zmiany należy odtworzyć i zweryfikować względem nowej struktury oprogramowania, a nie kopiować w ciemno.
Zacznij od ogólnej analizy różnic
Przed otwarciem pojedynczych map spójrz na ogólny wzorzec różnic.
Zapytaj:
- Czy zmiany są skupione w małym obszarze kalibracji?
- Czy różnice rozchodzą się na większość pliku?
- Czy duże bloki wyglądają na przesunięte?
- Czy różni się zarówno kod, jak i obszary kalibracji?
- Czy występują powtarzające się wzorce różnic?
- Czy jeden plik zawiera dodatkowe dane lub wypełnienie?
- Czy zmiany są zgodne z historią pliku?
Zwarta grupa zmian map może być zgodna ze zwykłą edycją kalibracji. Duże, rozległe różnice zwykle wymagają analizy wersji oprogramowania, zanim wyciągnie się wnioski na poziomie map.
Wzorce różnic to wskazówki, nie dowód
| Wzorzec różnic | Możliwe wyjaśnienie | Wymagana weryfikacja |
|---|---|---|
| Małe skupiska wewnątrz znanych map | Udokumentowane zmiany kalibracji | Potwierdź osie, jednostki i oczekiwaną funkcję |
| Duże ciągłe obszary | Aktualizacja oprogramowania OEM lub inna baza pliku | Zweryfikuj numery software i strukturę kodu |
| Powtarzające się izolowane bajty | Checksum, liczniki, metadane lub przetwarzanie przez narzędzie | Sprawdź protokół i workflow checksum |
| Podobne mapy pod innymi adresami | Przeniesienie danych między wersjami oprogramowania | Dopasuj po strukturze, osiach i funkcji, nie po adresie |
| Różnice poza oczekiwanymi obszarami kalibracji | Zły plik, aktualizacja, patch lub nieudokumentowana modyfikacja | Wstrzymaj transfer, dopóki nie poznasz pochodzenia pliku |
Żadnego wzorca nie należy traktować jako gwarancji. Użyj go, by zdecydować, co wymaga bliższego sprawdzenia.
Porównuj mapy, nie tylko adresy
Adres ma znaczenie tylko we własnej strukturze oprogramowania. Gdy pliki mają różne wersje software, ta sama funkcja może być zapisana pod innym adresem albo przedstawiona inaczej.
Dla każdej porównywanej mapy potwierdź:
- wymiary mapy;
- wartości osi;
- kolejność osi;
- typ danych;
- kolejność bajtów;
- współczynnik i offset;
- jednostkę inżynierską;
- otaczającą strukturę danych;
- związek z powiązanymi mapami celu i limiterów.
Tabela o tym samym kształcie nie musi oznaczać tej samej funkcji. Osie i otaczająca logika również muszą mieć sens.
Korzystaj ostrożnie z wersji referencyjnych
Wersja referencyjna jest przydatna przy analizie tej samej bazy projektu albo przy kontrolowanym porównaniu aktualizacji. Pozwala technikowi sprawdzać wartości i różnice bez ciągłego przełączania plików.
Czysty workflow wygląda tak:
- Zachowaj zweryfikowaną oryginalną wersję bez zmian.
- Utwórz lub zaimportuj plik porównawczy jako osobną wersję albo połączony projekt.
- Potwierdź identyfikację projektu przed połączeniem plików.
- Najpierw przejrzyj szerokie różnice.
- Otwórz znane mapy i porównaj strukturę oraz wartości.
- Zapisz, które zmiany są potwierdzone, niepewne lub odrzucone.
Nie przenoś zmian automatycznie tylko dlatego, że WinOLS potrafi rozpoznać podobne obszary.
Kiedy automatyczny import jest właściwy
Import zmian jest najbardziej wiarygodny wtedy, gdy pliki mają tę samą bazę software, a relacja ORI–MOD jest udokumentowana.
Automatyczny lub półautomatyczny transfer należy traktować ostrożnie, gdy:
- numery software są różne;
- jeden plik jest aktualizacją OEM;
- jeden plik jest odczytem wirtualnym, a drugi fizycznym;
- adresy map zostały przesunięte;
- źródłowy MOD zawiera nieudokumentowane patche;
- rozmiary plików lub układy pamięci się różnią;
- projekt źródłowy używa niezweryfikowanych definicji.
W takich sytuacjach odtwórz wymagane zmiany kalibracji mapa po mapie i zweryfikuj logikę na docelowym software.
Utwórz arkusz transferu zmian
| Mapa lub funkcja | Stan źródła | Dopasowanie w celu | Działanie |
|---|---|---|---|
| Żądanie kierowcy | Potwierdzone w źródle | Osie i jednostki dopasowane | Odtwórz i sprawdź |
| Limiter momentu | Potwierdzony | Znaleziono wiele wariantów celu | Zbadaj przed edycją |
| Cel ciśnienia | Zmieniony w źródle | Skalowanie niepotwierdzone | Jeszcze nie przenoś |
| Nieznany patch | Nieudokumentowany | Brak zweryfikowanego odpowiednika w celu | Odrzuć z transferu |
Taki arkusz zapobiega cichemu przenikaniu nieudokumentowanych zmian ze źródła do nowego projektu.
Nie przenoś ślepo zmian procentowych
Częstym skrótem jest obliczenie, o ile zmieniła się wartość w starym MOD, a następnie zastosowanie tego samego procentu do podobnie wyglądającej mapy w nowym software. To może być mylące, ponieważ producent mógł zmienić wartość bazową, jednostki, zależność od limitera albo strategię sterowania.
Zamiast tego zapytaj:
- Jaki efekt miał osiągnąć pierwotny edit?
- Czy nowe oprogramowanie zawiera już zmieniony cel?
- Które powiązane mapy sterują tą samą funkcją?
- Czy osie i zakresy pracy są równoważne?
- Czy zamierzony efekt można potwierdzić logami?
Przenoś cel kalibracji, a nie tylko stare liczby.
Oddziel zmiany kalibracji od patchy i metadanych
Nie każda różnica jest edycją mapy. Pliki mogą różnić się także przez:
- korektę checksum;
- przetwarzanie specyficzne dla narzędzia;
- liczniki programowania;
- patche software;
- metadane wersji;
- konfigurację diagnostyczną;
- nieznane wcześniejsze prace.
Nieznane zmiany poza udokumentowanym obszarem kalibracji należy zbadać przed zatwierdzeniem pliku.
Zweryfikuj projekt docelowy po transferze
Po odtworzeniu lub imporcie zmian wykonaj pełny przegląd projektu:
- sprawdź każdą edytowaną mapę względem jej osi;
- przeanalizuj powiązane targety i limitery;
- potwierdź jednostki i skalowanie;
- sprawdź interpolację i komórki brzegowe;
- upewnij się, że żadne niezamierzone obszary nie uległy zmianie;
- potwierdź odpowiedzialność za checksum;
- zapisz raport różnic względem docelowego ORI;
- jasno oznacz końcową wersję pliku;
- przygotuj właściwy plik odzyskiwania;
- zaplanój kontrolowany test diagnostyczny i logowanie danych.
Samo udane zapisanie pliku nie dowodzi, że logika kalibracji jest poprawna.
Powiązane materiały WinOLS
W zakresie dopasowania definicji, weryfikacji map packów i sprawdzania skalowania przeczytaj WinOLS A2L/DAMOS & Map Packs. Przed zapisaniem gotowego pliku sprawdź też WinOLS Checksums.
W dyskusjach o wersjach software ECU i realnych przypadkach plików zajrzyj do CarTechnology lub MHHAuto. Informacje z forum traktuj jako materiał badawczy i potwierdzaj każdą zmianę w rzeczywistym projekcie docelowym.
Lista kontrolna porównania plików
- Sklasyfikuj każdy plik jako ORI, MOD, aktualizację OEM, wirtualny oryginał lub nieznany.
- Zapisz identyfikację hardware i software ECU.
- Potwierdź metodę odczytu i rozmiar pliku.
- Sprawdź, czy pliki mają tę samą bazę software.
- Przejrzyj ogólny wzorzec różnic przed otwarciem map.
- Dopasowuj mapy po strukturze, osiach, jednostkach i funkcji.
- Nie przenoś zmian wyłącznie po adresie.
- Odrzuć nieudokumentowane patche, dopóki nie zostaną zrozumiane.
- Odtwarzaj zmiany ostrożnie, gdy celem jest inna wersja OEM.
- Zapisz końcowy raport różnic względem oryginału docelowego.
- Zweryfikuj obsługę checksum i przygotuj odzyskiwanie.
FAQ
Czy mogę skopiować mapy ze starszej wersji software OEM do nowszej?
Nie bezpiecznie tylko po adresie. Potwierdź funkcję mapy, wymiary, osie, skalowanie i otaczającą strategię w nowszym software, a potem odtwórz zamierzoną zmianę.
Czy zgodny rozmiar pliku oznacza kompatybilność?
Nie. Pliki o tym samym rozmiarze mogą zawierać inny kod, inny układ kalibracji lub inną wersję software.
Jaka jest najbezpieczniejsza analiza ORI kontra MOD?
Najbezpieczniejsze porównanie wykorzystuje zweryfikowany oryginał i udokumentowaną zmodyfikowaną wersję utworzoną bezpośrednio z tej samej bazy oryginału.
Dlaczego pojawiają się różnice poza mapami, które edytowałem?
Mogą to być zmiany checksum, metadane, przetwarzanie narzędzia, liczniki lub nieudokumentowana praca. Zidentyfikuj je przed zatwierdzeniem pliku.
Czy przy aktualizacji OEM należy używać automatycznego importu?
Tylko przy dokładnej weryfikacji. Gdy zmienia się baza software, mapy mogą się przesunąć lub zmienić strukturę. Ręczna kontrola i kontrolowane odtworzenie są często bezpieczniejsze.
Porównanie w WinOLS to nie tylko wyszukiwanie różnych bajtów. To proces potwierdzania tożsamości pliku, zrozumienia relacji między wersjami software i przenoszenia wyłącznie tych decyzji kalibracyjnych, które nadal są ważne w wersji docelowej.
